
新品海外首展,非夕科技亮相 ICRA 2026:展示自适应机器人平台进展
6月1日至5日,IEEE International Conference on Robotics and Automation 2026(ICRA 2026)在奥地利维也纳举行。非夕科技亮相本届大会,并在 Hall B130 展位展示面向真实世界复杂操作任务的自适应机器人平台与技术进展。

ICRA是机器人领域重要的国际会议之一,长期聚焦机器人前沿研究、关键技术突破与产业应用趋势。随着物理智能(Physical AI)加速从感知、规划走向真实世界执行,机器人如何在动态环境中完成稳定接触、精确施力和可靠操作,正在成为学术界与产业界共同关注的问题。
此次ICRA 2026,非夕科技围绕复杂接触操作这一核心议题,带来主题演讲、产品展示与现场演示,系统呈现自适应机器人技术赋能物理AI真实世界交互的最新进展。
新一代自适应机器人平台面向海外展示
本次参会也是非夕科技新产品体系面向海外机器人生态的重要展示窗口。此前,非夕科技已发布新一代全感知自适应机器人Enlight 初昕、一体化仿人智能平台MICO,以及新一代多臂控制器Orion,进一步完善面向物理智能的自适应机器人平台组合。
在ICRA 2026现场,初昕作为非夕科技新一代全感知自适应机器人,首次面向海外机器人市场展示。该系列产品采用轻量化仿人设计,集成全身感知系统、本质安全结构和层级式控制架构,面向高灵活度、高响应速度和高可靠性的下一代智能操作任务。
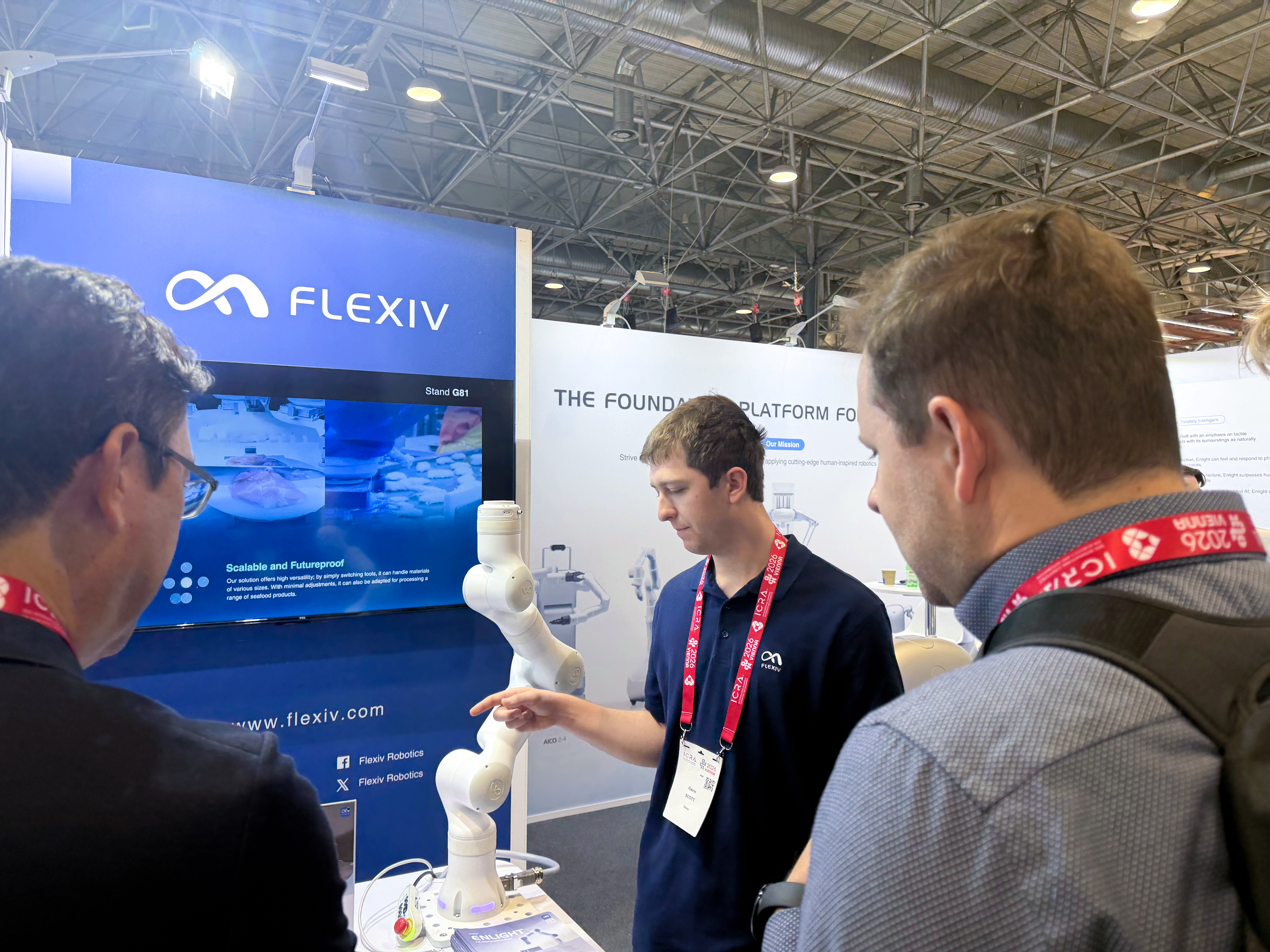
不同于单纯追求末端位置精度的机器人系统,轻量化设计的初昕更强调机器人在接触过程中的感知、响应和控制能力。其在全关节层级集成高精度多维力传感器,形成覆盖整臂的全身力感知系统,最多支持7点同时接触,具备毫米级位置感知精度,这使具备更强的接触理解和稳定操作基础。
MICO Armor也在本届大会中展示。作为基于初昕平台打造的一体化仿人智能平台,MICO系列采用模块化架构,可根据不同任务需求进行组合扩展,并由Orion控制系统作为双臂控制核心,支持多轴数据处理、同步规划以及双臂运动与力控协调。
从单臂操作到双臂平台,从本体能力到控制系统,非夕科技通过标准化、模块化的平台建设,为物理智能研究、应用开发和真实场景部署提供更稳定的机器人基础设施。
除初昕和MICO Armor外,非夕科技还在展台展示基于高透明力反馈遥操作工具包(TDK)打造的遥操桌面高尔夫体验。

该展示采用主从臂架构,操作者通过主臂控制从臂实时同步动作,并通过高透明力反馈获得更直接的操作感知。它以直观方式呈现非夕在遥操作、力反馈、低延迟控制和安全交互方面的系统能力,也展示自适应机器人在精细操作任务中的稳定性和可控性。
对于机器人系统而言,高透明力反馈遥操作不仅是一种交互方式,也是一类重要的数据采集和技能传递路径。通过稳定的主从控制与高保真的力反馈,机器人能够更有效地连接人类操作经验与真实世界任务执行。
从“最后一毫米”看复杂接触操作
会议期间,非夕科技联合创始人钟书耘发表产业主题演讲,主题为 “Bridging the Last Millimeter in Contact-Rich Manipulation”。

在机器人进入真实世界的过程中,“最后一毫米”往往不是一个简单的位置问题,而是机器人与物理世界真正发生接触时需要解决的系统问题:接触何时发生,接触力是否稳定,摩擦是否会引发振荡,位置误差能否被吸收,外部扰动是否会影响任务执行等。
这些问题在制造、医疗、物流、服务和科研等自动化场景中普遍存在。机器人要完成复杂接触操作,不能只依赖视觉感知或轨迹规划,还需要在接触过程中持续感知环境变化,并通过本体设计、力感知力控和系统级控制能力实现稳定交互。
钟书耘在演讲中围绕接触数据稀缺、位置不确定性、仿真到现实的迁移差距等问题,分享非夕科技在力感知力控以及物理智能真实世界落地中的技术实践。
体系化布局前沿技术研究
围绕真实世界操作,非夕科技共有三项研究成果在ICRA 2026期间进行展示交流,覆盖底层控制、历史感知策略学习与灵巧操作学习等方向,共同指向机器人从任务理解走向稳定执行所需的系统能力。
在真实场景中,机器人不仅需要完成单步动作,还需要在接触、扰动、重复状态和高自由度操作中保持稳定性与连续性。接触任务需要机器人在摩擦和环境不确定性中稳定施力;长程任务需要机器人有效利用历史信息,判断任务阶段并保持过程记忆;灵巧操作则需要机器人协调机械臂空间定位与手部精细动作。

相关研究从不同层面回应了这些问题:通过零空间优化提升冗余机器人在复杂接触任务中的力控稳定性;通过基于物体中心点跟踪的历史表征,使视觉运动策略更有效地利用历史信息;通过量化手部状态,降低灵巧手高自由度控制对臂手协同学习的干扰。
从底层控制到策略学习,这些工作体现了非夕科技围绕自适应机器人和具身智能落地的系统化研发思路。真实世界操作能力并不只来自单一模型或单一硬件,而是来自本体、感知、力控、运动控制、历史记忆和动作学习等能力的协同建设。

此外,在ICRA展会期间,非夕科技欧洲业务负责人Thomas Zandes围绕公司技术路线、产品体系和应用进展,与海外客户、开发者及产业伙伴展开交流,进一步加强非夕与欧洲机器人市场的连接。同时,千觉机器人也展示了基于其VTLA模型和非夕自适应机器人的叠纸盒任务,从生态伙伴实践侧面体现了非夕作为通用智能机器人基座平台对上层应用开发的支撑能力。
未来,非夕科技将继续聚焦通用机器人基座平台,持续提升机器人面向真实场景的操作能力,推动自适应机器人在制造、医疗、服务、科研等场景中实现更稳定、更可靠的物理交互。




