Digital I/O Control
Flexiv RDK can also control the general-purpose digital I/O ports located on the robot’s control box. A total of 16 digital outputs and 16 digital inputs are available. The digital inputs can be read via Robot::ReadDigitalInput(), and the digital outputs can be written via flexiv::Robot::WriteDigitalOutput().
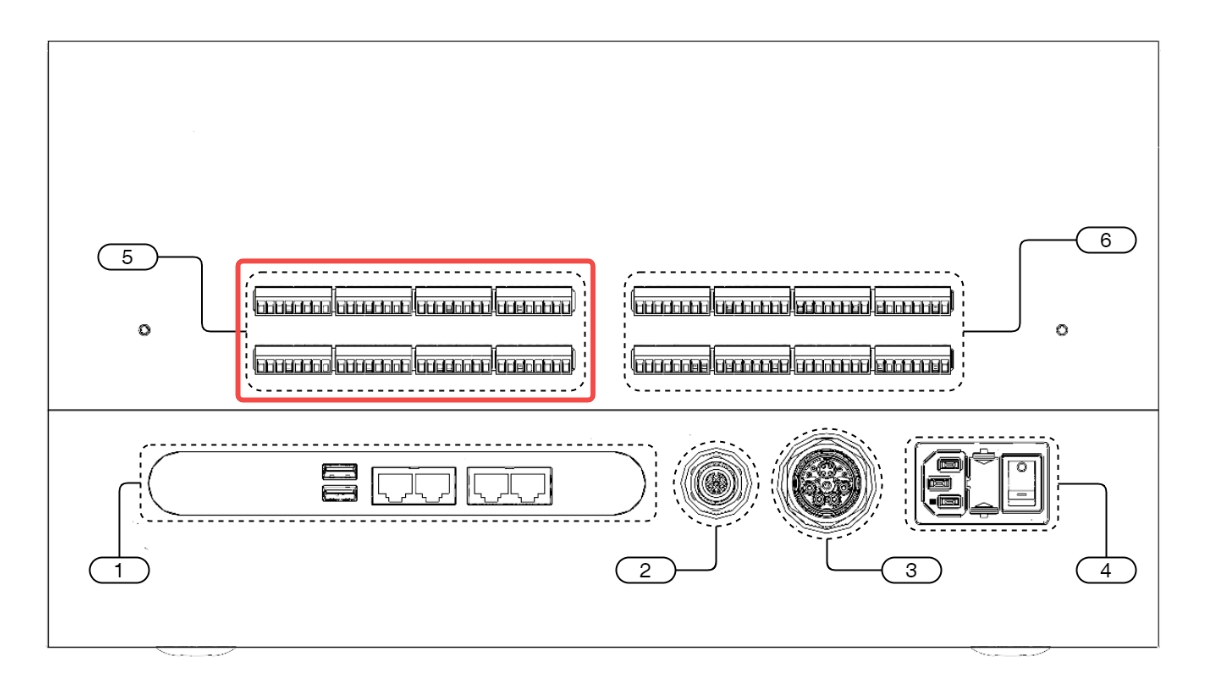
5 - General-purpose digital I/O, 6 - Safety I/O
Note
Make sure to use the I/O ports marked in the red rectangle. Safety I/O is only accessible by the safety system, not by the robot software.