
新能源汽车自动充电
随着电动汽车行业的高速发展,停车场充电场景存在诸多问题,涉及改造成本高、充电桩利用效率低、停车场空间利用率低下、车主时间分配受限等各种问题,新能源汽车的移动充电服务由此而生。
自2020年移动充电机器人概念进入公众视野,已有十余款相关的移动充电解决方案出现,但在部分方案中,仍然需要由人和操作机构配合来完成全流程。目前只有搭载机械臂的移动充电机器人可以实现100%全流程自动化,但许多方案在误差容忍和柔性作业方面面临着挑战。
案例介绍
客户:合创汽车
合创汽车致力于打造安全、高效的MPS产品(mobility power supply),为用户提供无感且便利的供能充电服务。该客户要求完成商业场景下的直流充电桩充电,需适应移动平台停车的位置误差,并且避免在插拔充电枪过程中对汽车充电口及充电头造成损伤。
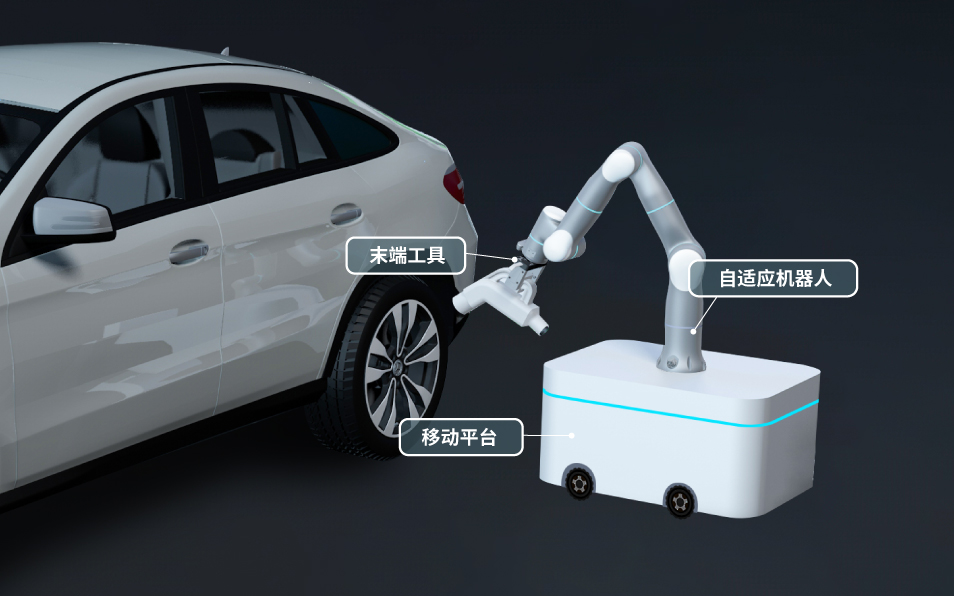
非夕方案简介
非夕打造了基于自适应机器人和先进AI技术的移动机器人充电解决方案,依靠机器人的精细力控和深度学习算法,以仿人化的方式实现充电枪的柔顺插拔。插拔过程稳定可靠,且不会对充电设备造成损伤。此外,自适应机器人具有七轴构型,在复杂的空间内可以通过姿态调整避开障碍,环境适应性更强。
技术特色
高性能力控
高响应、高精度的高性能力控,确保任务执行的精准可靠。
高适应性AI算法
即使在低硬件配置的状况下,非夕自研的AI视觉算法仍对环境具备较高容忍度,并可自动调整角度二次拍照纠偏,提高识别准确率。
方案优势
安全可靠 人车无忧
自适应机器人Rizon 4获得CE&ETL双安全认证,具备本质安全性,可确保充电过程中人员、车身以及充电装置的安全无损。
柔顺插拔 避免设备损耗
基于多种力控策略及柔顺控制的仿人化插拔动作,可确保插拔过程的柔顺、稳定、可靠,避免因姿态、位置、轨迹精度等原因出现充电口的损伤或损耗。
通用灵活 自适应误差
依靠自身力控特性,搭配高环境适应性的AI视觉算法,自适应机器人可通过力控搜孔、柔性装配等策略,极大程度容忍由可移动平台、周围环境等带来的系统误差。




